Mechanika budowli
Tablice metoda przemieszczeń
- Wprowadzenie: Metoda przemieszczeń w ujęciu graficznym
- Idea metody: Wykresy jednostkowe jako "klocki" do budowy rozwiązania
- Rola tablic w metodzie przemieszczeń
- Równania równowagi i obliczanie reakcji
- Jak powstała tablica do metody przemieszczeń? – Wyprowadzenie przypadku
Wprowadzenie: Metoda przemieszczeń w ujęciu graficznym
Metoda przemieszczeń, obok metody sił, jest jednym z dwóch filarów analizy układów statycznie niewyznaczalnych. W jej klasycznej, algebraicznej formie, opiera się na skomplikowanych wzorach transformacyjnych (równaniach nachylenia-ugięcia). Istnieje jednak alternatywne, bardziej intuicyjne podejście. Zamiast operować na wzorach, metoda ta wykorzystuje gotowe, wykreślne rozwiązania ze specjalnie przygotowanych tablic.
Podstawowa zasada pozostaje ta sama: niewiadomymi są przemieszczenia węzłów (kąty obrotu \(\varphi\) i przesunięcia \(\Delta\)), a warunkiem do ich znalezienia są równania równowagi. Zmienia się jednak sposób, w jaki dochodzimy do tych równań – zamiast wyprowadzać wzory, odczytujemy gotowe wartości z wykresów.
Idea metody: Wykresy jednostkowe jako "klocki" do budowy rozwiązania
Podobnie jak w wersji klasycznej, pierwszym krokiem jest określenie stopnia kinematycznej niewyznaczalności i nałożenie myślowych blokad na wszystkie możliwe do przemieszczenia węzły (zarówno obrotowe, jak i przesuwne). Otrzymujemy w ten sposób układ podstawowy – zbiór prętów w pełni unieruchomionych na końcach.
Następnie, zamiast pisać wzory, analizujemy trzy rodzaje stanów, rysując dla nich wykresy momentów:
- Stany jednostkowe od obrotu (\(\varphi_i=1\)): Wymuszamy jednostkowy obrót w miejscu i-tej blokady obrotu. Odpowiadający mu wykres momentów (\(\bar{M}_i\)) pokazuje, jakie siły "oporu" pojawiają się w konstrukcji w odpowiedzi na ten obrót.
- Stany jednostkowe od przesuwu (\(\Delta_j=1\)): Wymuszamy jednostkowy przesuw w miejscu j-tej blokady przesuwu. Wykres momentów (\(\bar{M}_j\)) pokazuje reakcje konstrukcji na ten przesuw.
- Stan od obciążeń zewnętrznych (\(M_P\)): Rysujemy wykres momentów w układzie podstawowym (z wszystkimi blokadami) od działania rzeczywistych obciążeń zewnętrznych.
Ostateczny wykres momentów jest superpozycją tych stanów: \( M_{ost} = M_P + \sum \varphi_i \cdot \bar{M}_i + \sum \Delta_j \cdot \bar{M}_j \).
Rola tablic w metodzie przemieszczeń
Skąd brać wykresy dla stanów jednostkowych i stanu od obciążeń? Właśnie tu z pomocą przychodzą tablice do metody przemieszczeń. Są one swego rodzaju "wizualną encyklopedią" gotowych rozwiązań dla pojedynczych prętów w różnych warunkach podparcia.
Tablice te zazwyczaj zawierają trzy główne sekcje dla różnych typów prętów (utwierdzenie-utwierdzenie, utwierdzenie-przegub, utwierdzenie-łyżwa pionowa):
- Wykresy od wymuszeń jednostkowych: Pokazują linię ugięcia oraz wykres momentów gnących i wartości sił tnących na końcach pręta dla wymuszonego obrotu (\(\varphi=1\)) lub przesuwu (\(\Delta=1\)) na jednym z końców pręta.
- Wykresy od obciążeń zewnętrznych: Przedstawiają gotowe wykresy momentów gnących dla różnych, typowych przypadków obciążenia (siła skupiona, obciążenie ciągłe, moment itp.) przyłożonych do pręta w układzie podstawowym.
Dzięki tablicom, etap rysowania wykresów jednostkowych i wykresu \(M_P\) sprowadza się do odnalezienia odpowiedniego przypadku w tabeli i przepisania go ze skalowaniem do naszego zadania.
Równania równowagi i obliczanie reakcji
Po narysowaniu wszystkich niezbędnych wykresów, piszemy równania równowagi dla usuniętych blokad:
- Dla blokady obrotu: Suma momentów w wyciętym węźle musi być równa zeru (\( \sum M = 0 \)). Wartości momentów do sumy odczytujemy bezpośrednio z odpowiednich wykresów (\(M_P, \bar{M}_i, \bar{M}_j\)) w miejscu analizowanego węzła.
- Dla blokady przesuwu: reakcje od tej blokady oblicza się jedną z dwóch metod:
- Zasada prac wirtualnych (ZPW): Jest to metoda uniwersalna.
- Metoda wycięć: Polega na wykonaniu odpowiedniego "cięcia" przez konstrukcję. Sposób cięcia zależy od konkretnego przypadku.
Rozwiązanie tak powstałego układu równań daje nam wartości rzeczywistych przemieszczeń (\(\varphi_i, \Delta_j\)), co pozwala – poprzez superpozycję – narysować ostateczne wykresy momentów gnących.
Jak powstała tablica do metody przemieszczeń? – Wyprowadzenie przypadku
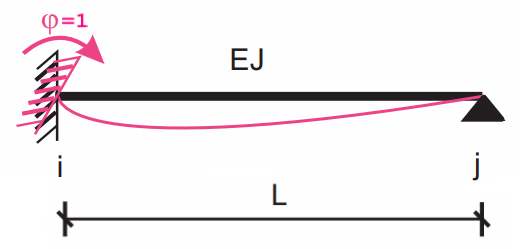
Tablice do metody przemieszczeń nie są "magicznym" zbiorem danych, lecz wynikiem precyzyjnych obliczeń. Każdy wykres momentów dla stanu jednostkowego (np. od wymuszonego obrotu \(\varphi=1\)) to w rzeczywistości rozwiązanie prostego zadania z mechaniki budowli. Aby zrozumieć ten proces, przeanalizujmy krok po kroku, jak powstaje wykres momentów dla pręta utwierdzonego na końcu \(i\) i podpartego przegubowo na końcu \(j\), poddanego jednostkowemu obrotowi \(\varphi_i=1\).
Zadanie to jest statycznie niewyznaczalne i możemy je rozwiązać za pomocą metody sił.
Krok 1: Określenie zadania i wybór układu podstawowego
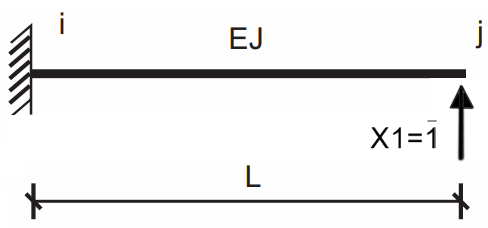
Naszym zadaniem jest znalezienie momentów w pręcie (\(i\)-\(j\)) o długości \(L\) i sztywności \(EI\), który w podporze \(i\) został obrócony o kąt \(\varphi_i=1\). Układ jest jednokrotnie statycznie niewyznaczalny. Jako układ podstawowy przyjmujemy belkę wspornikową, utwierdzoną w \(i\) i swobodną na końcu \(j\). Nadliczbową siłą \(X_1\) jest pionowa reakcja w usuniętej podporze przegubowej \(j\) - przyjmijmy ze zwrotem do góry.
Krok 2: Zapisanie równania kanonicznego metody sił
Warunkiem zgodności przemieszczeń jest zerowe ugięcie pionowe w punkcie \(j\). Równanie kanoniczne ma więc postać:
\[ \delta_{11}X_1 + \Delta_{1G} = 0 \]Gdzie poszczególne przemieszczenia oznaczają:
- \(\delta_{11}\) – przemieszczenie pionowe w punkcie \(j\) od działania siły jednostkowej \(X_1=1\).
- \(\Delta_{1G}\) – wyraz wolny, oznaczający przemieszczenie pionowe w punkcie \(j\) od "obciążenia" geometrycznego, którym jest wymuszony obrót \(\varphi_i=1\).
Krok 3: Obliczenie współczynników \(\delta_{11}\) i \(\Delta_{1G}\)
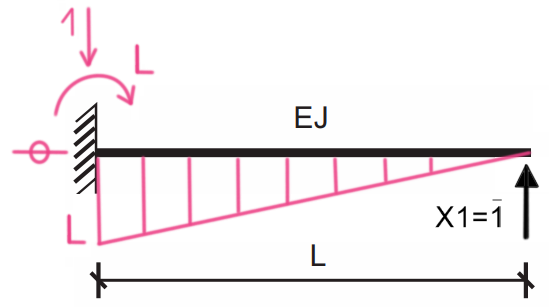
Obliczenie \(\delta_{11}\):Stan od \(X_1=1\) to wspornik obciążony siłą \(P=1\) na swobodnym końcu. Wykres momentów \(\bar{M}_1(x)\) jest trójkątem o wartości \(L\) przy utwierdzeniu.
Całkując ten wykres sam przez siebie, otrzymujemy:
\[ \delta_{11} = \int_0^L \frac{\bar{M}_1(x) \cdot \bar{M}_1(x)}{EI} dx = \frac{L^3}{3EI} \]Wyraz wolny od obciążeń geometrycznych obliczamy ze wzoru:
\[ \Delta_{1G} = - \sum (R_j \cdot \delta_j) \] Gdzie \(R_j\) to wirtualna reakcja w miejscu i kierunku zadanego przemieszczenia geometrycznego \(\Delta_j\). W naszym przypadku mamy jedno przemieszczenie geometryczne: obrót \(\varphi_i=1\) w podporze \(i\). Musimy więc znaleźć wirtualną reakcję momentową w podporze \(i\) od działania siły jednostkowej \(X_1=1\).
Przyjmijmy konwencję, że momenty i obroty zgodne z ruchem wskazówek zegara są dodatnie. Siła \(X_1=1\) (działająca w górę) wywołuje w utwierdzeniu \(i\) moment reakcyjny równy \(+L\). Nasz wymuszony obrót to \(\varphi_i=1\). Zatem:
\[ \Delta_{1G} = - (\bar{M}_{reakcja, i} \cdot \varphi_i) = - (L \cdot 1) = -L \]
Krok 4: Obliczenie siły nadliczbowej \(X_1\)
Wstawiamy obliczone wartości do równania kanonicznego:
\[ \frac{L^3}{3EI} X_1 - L = 0 \implies X_1 = \frac{3EI}{L^2} \]Krok 5: Wyznaczenie ostatecznego wykresu momentów
Ostateczny moment w dowolnym punkcie pręta jest sumą momentów od obciążenia zewnętrznego (którego nie ma, więc \(M_P=0\)) i momentu od siły nadliczbowej \(X_1\). Wykres \(\bar{M}_1(x)\) od siły \(X_1=1\) to trójkąt o wartości 0 przy podporze \(j\) i \(L\) przy utwierdzeniu \(i\).
\[ M_{ost}(x) = M_P(x) + X_1 \cdot \bar{M}_1(x) = 0 + \frac{3EI}{L^2} \cdot \bar{M}_1(x) \]Moment w utwierdzeniu \(i\) wynosi zatem:
\[ M_{ik} = \frac{3EI}{L^2} \cdot (L) = \frac{3EI}{L} \]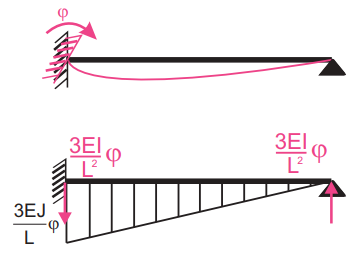
Jest to dokładnie wartość (ze znakiem zgodnym z konwencją rozciągania dolnych włókien), którą znajdujemy w tablicach dla momentu w utwierdzeniu przy wymuszonym obrocie \(\varphi=1\). Wykres ostateczny momentów jest trójkątem o wartościach od \(\frac{3EI}{L}\) w podporze \(i\) do 0 w podporze \(j\).
Taki sam proces, powtórzony dla różnych typów prętów i wymuszeń lub sił zewnętrznych, pozwolił na skompilowanie kompletnych tablic do metody przemieszczeń, które dziś znacząco przyspieszają obliczenia inżynierskie.