Rozwiązanie
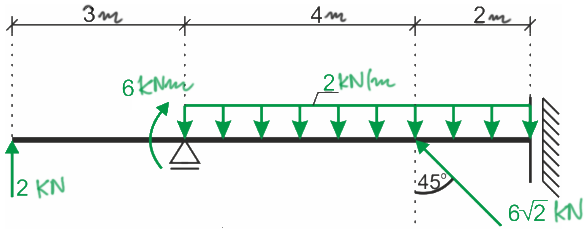
Rys1. Temat zadania
W celu obliczenia reakcji podporowych zabieramy po kolei każdą z trzech więzi(blokada ruchu pionowego w podporze przegubowej oraz blokada ruchu poziomego i obrotu w utwierdzeniu z przesuwem).
Po zabraniu więzi z układu geometrycznie niezmiennego staje się on mechanizmem i mamy za zadanie narysować dopuszczalny ruch tego mechanizmu.
Zabierając daną więź zastępujemy ją reakcją podporową i rysujemy albo nową postać podpory jeśli w tym miejscu zostały inne więzi
albo jeśli była tylko jedna więź i ją zabierzemy to podpory już w tym miejscu nie będzie.
Zobacz więcej na temat rodzajów podpór na płaszczyźnie

Rys2. Plany przemieszczeń wirtualnych po zabraniu kolejnych więzi
Zaznaczam punkty charakterystyczne na belce, reakcje, składowe poziomą i pionową od siły pod kątem, wypadkową od obciążenia ciągłego.Następnie rysuję trzy plany przemieszczeń.
Opis planów przemieszczeń i zasady tworzenia takiego planu:
Belka którą rozpatrujemy nie posiada przegubów, więc jest belką prostą (jedną tarczą).
a) Musimy pamiętać, że tarcza która ma blokadę obrotu i przesuwu w jednym kierunku (czyli jest to łyżwa lub te blokady mogą być w dwóch różnych punktach tarczy, jak w trzecim planie przemieszczeń) to wtedy taka tarcza nie może się obracać w ogóle, a ruch jest możliwy tylko na kierunku prostopadłym do nałożonej blokady!
Czyli jest możliwy tylko ruch liniowy (translacja). W tym przypadku pionowo, bo na taki ruch pozwala łyżwa.
Raz jeszcze zachęcam do zapoznania się z naszym wstępem na temat rodzajów podpór na płaszczyźnie.
Pozwoli to lepiej zrozumieć jakie mamy reakcje w danym typie podporze i uświadomić sobie jakie reakcje i typ podpory zostanie po zabraniu jednej z więzi (pozostałe więzi w podporze zostają, więc zmienia się jej rodzaj/charakter).
Z powyższego wynika taki plan przemieszczeń jak zaznaczono na rys2a).
Każdy punkt tarczy ma możliwość ruchu pionowo, z taką samą prędkością, którą opiszemy jako \( \delta \) ,
dowolnie zakładamy ruch do góry lub w dół.
W szczególności interesują nas prędkości punktów w których na belce mamy zaznaczone siły skupione lub wypadkowe od obciążeń ciągłych.
Po zaznaczeniu prędkości przemnażamy siły skupione z belki przez prędkości liniowe z planu przemieszczeń, a momenty skupione przez prędkości kątowe (jeśli są, w tym przypadku nie mamy prędkości kątowej, bo tarcza nie może się obracać).
Jeśli zwroty siły i przemieszczenia są zgodne przemnażam je z plusem, jeśli przeciwne - z minusem. Przemnażam również reakcję w zabranej więzi, tutaj \( V_B \). \[ \delta L= 2\cdot \delta -12\cdot \delta +6\cdot \delta +V_B\cdot \delta =0 \] \[ V_B=4 \ kN \]
b) W tym przypadku chcemy obliczyć reakcję \( M_D \), więc zabieram blokadę obrotu z punktu D, zostaje wówczas tylko więź pozioma, a więc podpora przegubowo przesuwna w pionie.
W takim razie tarcza jest podparta dwoma podporami przegubowymi przesuwnymi.
Jeśli mamy informację o ruchu dwóch punktów tarczy, to środek obrotu tarczy leży w punkcie przecięcia prostopadłych do tych możliwości ruchu, przechodzących przez punkt zaczepienia prędkości, czyli tutaj podporę B.
Podpora w punkcie B może poruszać się poziomo, podpora D pionowo, puszczam prostopadłe do tych możliwości ruchu przechodzące przez punkty B i D i te prostopadłe przecinają się... w punkcie B. Tutaj jest więc środek obrotu dla tej tarczy.
Zakładam prędkość kątową \( \omega_I \), nadaję jej wartość \( \delta \) (zwrot prędkości dowolny). Następnie zaznaczam prędkości liniowe w punktach charakterystycznych,
pamiętając że im dalej punkt jest oddalony od środka obrotu tym jego prędkość liniowa jest większa.
\[ V=\omega \cdot r \]
gdzie:
V - prędkość liniowa,
\( \omega \) - prędkość kątowa ,
r - ramię wodzące (odległość od środka obrotu do punktu w którym wyznaczam prędkość liniową).
Po narysowaniu planu przemieszczeń przemnażam go przez siły na belce oraz reakcję \( M_D \).
\[ \delta L=2\cdot 3\delta +6\cdot \omega_I +12\cdot 3\delta -6\cdot 4\delta - M_D\cdot \omega_I =0 \]
\[ M_D = 24 \ kNm \]
V - prędkość liniowa,
\( \omega \) - prędkość kątowa ,
r - ramię wodzące (odległość od środka obrotu do punktu w którym wyznaczam prędkość liniową).
c) W tym przypadku chcemy obliczyć reakcję \( H_D \), więc zabieram blokadę poziomego ruchu z punktu D,
zostaje wówczas tylko blokada obrotu, którą symbolizujemy "klinem" (zobacz rodzajów podpór na płaszczyźnie).
W takim razie tarcza jest podparta podobnie jak w punkcie a) blokadą obrotu i blokadą ruchu w jednym kierunku.
Ma więc możliwość tylko ruchu liniowego w kierunku prostopadłym do zablokowanego (pionowego).
Zakładam ruch dowolnie w prawo lub w lewo, nadaję prędkość każdemu punktowi belki równą \( \delta \) i przemnażam siły i reakcje z zabranej więzi przez wirtualne prędkości: \[ \delta L=- \delta \cdot 6 +H_D\cdot \delta =0 \] \[ H_D=6 \ kN \]
Pozostaje jeszcze (zgodnie z treścią zadania) obliczyć moment wewnętrzny belki w miejscu przyłożenia siły pod kątem (punkt C).
Aby policzyć moment wewnętrzny w określonym punkcie konstrukcji - wstawiamy w tym miejscu zwykły przegub kołowy
Gdybyśmy chcieli policzyć siłę tnącą - należy wstawić przegub ślizgowy pionowy
Aby policzyć siłę normalną - należy wstawić przegub ślizgowy poziomy
Gdybyśmy chcieli policzyć siłę tnącą - należy wstawić przegub ślizgowy pionowy
Aby policzyć siłę normalną - należy wstawić przegub ślizgowy poziomy

Rys3. Plan przemieszczeń wirtualnych do obliczenia momentu w punkcie C
Opis planu przemieszczeń i zasady tworzenia takiego planu:Po dodaniu przegubu belka którą rozpatrujemy składa się z dwóch tarczy (przegub oddziela tarcze) - tarcza I (AC) od początku belki do przegubu i tarcza II (CD) od przegubu do końca belki.
Zauważamy, że tarcza II jest podparta łyżwą, więc albo porusza się ruchem liniowym (pionowo), albo nie może poruszać się wcale.
Jeśli ma się poruszać liniowo, wtedy punkt styku tarcz (przegub) również miałby poruszać się pionowo. Mamy potencjalnie informację o ruchu dwóch punktów tarczy I (punkt B - możliwy ruch poziomy, punkt C - możliwy ruch pionowy). Środek obrotu znajduje się więc na przecięciu prostopadłych do tych możliwości ruchu (przecinają się one w punkcie... B).
Na tym analiza się kończy, taki ruch jest możliwy, nie doszliśmy do żadnej sprzeczności.
Nadajemy teraz prędkości, możemy zacząć albo od nadania prędkości kątowej tarczy I albo od prędkości liniowej tarczy II, nie ma znaczenia od czego zaczniemy.
Załóżmy, że zaczniemy od narzucenia prędkości liniowej tarczy II o wartości \( \delta \) (nie ma znaczenia również czy narzucimy tą prędkość ze zwrotem do góry, czy w dół). Następnie musimy określić jaka ma być wartość prędkości kątowej \( \omega_I \), aby w odległości 4 metrów spowodowała prędkość liniową \( \delta \) - na punkcie styku. A więc \( \omega_I \cdot 4m = \delta \Rightarrow \omega_I = \frac{1}{4m}\cdot \delta \). Znając tą wartość określam prędkości liniowe w punktach charakterystycznych (w punktach w których na belce są obciążenia). Uwaga - ponieważ przegub podzielił tą belkę na dwie tarcze, wyznaczam wypadkową od obciążenia ciągłego dla jednej i dla drugiej tarczy osobno.
Po narysowaniu planu przemieszczeń przemnażam go przez siły na belce oraz moment wewnętrzny \( M_C \). Należy zwrócić uwagę, że jeden moment jest na tarczy, na której jest prędkość kątowa, więc będzie przez nią przemnożony, a drugi jest na tarczy na której prędkości kątowej nie ma, więc zostanie pominięty. \[ \delta L=2\cdot 0,75\delta +6\cdot \omega_I +8\cdot 0,5\delta -6\cdot \delta + 4\cdot \delta - M_C\cdot \omega_I =0 \] \[ M_C = 20 \ kNm \] Ułatwieniem przy nauce zasady prac wirtualnych jest to, że belkę, ramę czy kratownicę którą uczymy się rozwiązywać tą metodą można sprawdzić rozwiązując ją w sposób klasyczny - Zobacz rozwiązanie tej belki przy wykorzystaniu równań statyki.
Jeżeli masz jakieś pytania, uwagi lub wydaje Ci się, że znalazłeś błąd w tym rozwiązaniu, napisz proszę do nas wiadomość na kontakt@edupanda.pl lub skontaktuj się z nami przez nasz profil na FB: